
| SinusLeistungsSteller - Entwicklungsstand/2017 |
|
Hier werden wir ständig über den aktuellen Entwicklungsstand und -fortschritt berichten ... Details zur Funktionsweise des SLS finden sich hier (klick mich...) 26.06.2017: Mit dem neuesten Update des SLS-Windows-Monitors (V1.506) und der Firmware (V1.504) werden wieder einige Fehlerstellen bereinigt. Gleichzeitig bringen wir eine interessantes neues Feature für alle Bootsanwendungen: Auto-Reverse! Die Regeln einiger (Solar-)Bootrennen prüft und bewertet das schnelle Stoppen des Bootes in Notsituationen. Hier kam es oft zu Verwirrungen bzgl. der hierfür nötigen Einstellungen des cSLS/SLS. Um es dem Anwender künftig einfacher zu machen haben wir einen zusätzlichen Parameter AutoReverse (siehe Bild unten) eingeführt, der alle nötigen Einstellungen vornimmt. Bei aktiviertem AutoReverse muß zum Stoppen eines Boots nur der Hebel von vorwärts auf rückwärts umgelegt werden. Der Regler bremst dann zunächst der Propeller mit dem eingestellten Generatorstrom auf kleine Drehzahl ab. Unterschreitet die Drehzahl die Mindestdrehzahl, so wird die Feststellbremse (Kurzschluß aller 3 Motorphasen) aktiviert - auch dann, wenn in der Signalkurve überhaupt kein Feststellbremse aktiviert ist. Der Motor wird somit bis zum Stillstand (0 U/min) abgebremst und kann dann (automatisch - den Hebel einfach auf rückwärts halten!) in Gegenrichtung gestartet werden. Der damit erzeugte Umkehrschub bringt das Boot in kürzester Zeit zum Stillstand. Jetzt den Hebel natürlich zurück auf Neutral stellen! ... sonst fährt das Boot rückwärts weiter! Optimal wird die Sache, wenn die Signalkurve durchgehend auf Drehmomentregelung eingestellt wird - dann kann die Bremsverzögerung dosiert werden (Bremswirkung ist dann abhängig von der Hebelstellung). Bei Drehzahlregelung werden dagegen immer die maximalen Motor- bzw. Generatorströme wirksam. Bei nicht aktiviertem AutoReverse wird entsprechend der Signalkurve gearbeitet. Die Feststellbremse kann hier auch auf AUS gestellt werden (bei Booten sollte die Feststellbremse jedoch IMMER an sein!) um andere Anwendungen zu realisieren. Außerdem muß zum Reversieren eine kurze Pause auf Neutralstellung eingelegt werden, bevor in Gegenrichtung gestartet werden kann. Der Antrieb bremst also nur bis zum Stillstand ab und geht nicht automatisch in Gegenrichtung. Dieser Mode paßt also mehr zu einem Traktionsantrieb für ein Straßenfahrzeug. 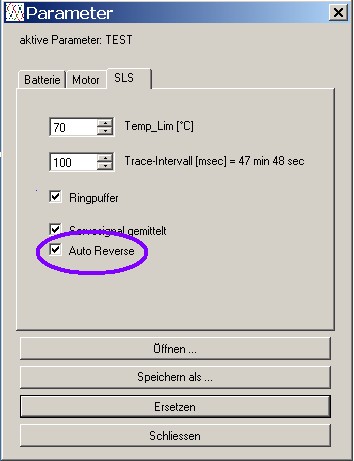
04.01.2017: Unter Leitung unseres Entwicklungspartners KLK GmbH haben wir eine Self-balancing-Funktion für das Konzept-Motorrad VISION NEXT 100 von BMW realisiert. Mehrere cSLSi-60-100 kamen dabei zum Einsatz. 
(c)BMW
03.01.2017: Ein gutes 2017 für alle unsere Kunden und Mitleser! ... Entwicklung 2016 ... (klick mich...) |